Công ty cổ phần công nghệ và tư vấn CIC
Tin chuyên ngành
Trang chủ > Tin tức > Tin chuyên ngành > Công nghệ LiDAR – Giải pháp hiện đại cho khảo sát 3D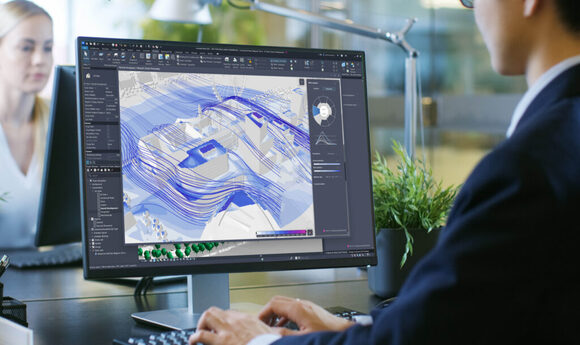



Công nghệ LiDAR – Giải pháp hiện đại cho khảo sát 3D
09/04/2020
Lượt xem 4439
Một hệ thống LiDAR điển hình thường được gắn cố định trên một loại máy bay phù hợp nào đó. Khi máy bay bay trên vùng cần khảo sát, cảm biến laser sẽ phát ra các chùm tia laser về phía đối tượng, bộ thu nhận tín hiệu laser gắn kèm với cảm biến sẽ thu nhận tín hiệu phản xạ từ đối tượng. Mỗi một giây hệ thống có thể thu nhận được vài trăm ngàn điểm đến vài triệu điểm LiDAR. Các đám mây điểm LiDAR này sau đó sẽ được xử lý sơ bộ dựa trên các phần mềm chuyên dụng.
1. Công nghệ LiDAR
1.1. Hệ thống LiDAR
Công nghệ LiDAR (Light Detection And Ranging) là công nghệ mới được áp dụng tại Việt Nam, cho phép đo đạc độ cao chi tiết địa hình một cách nhanh chóng và chính xác.
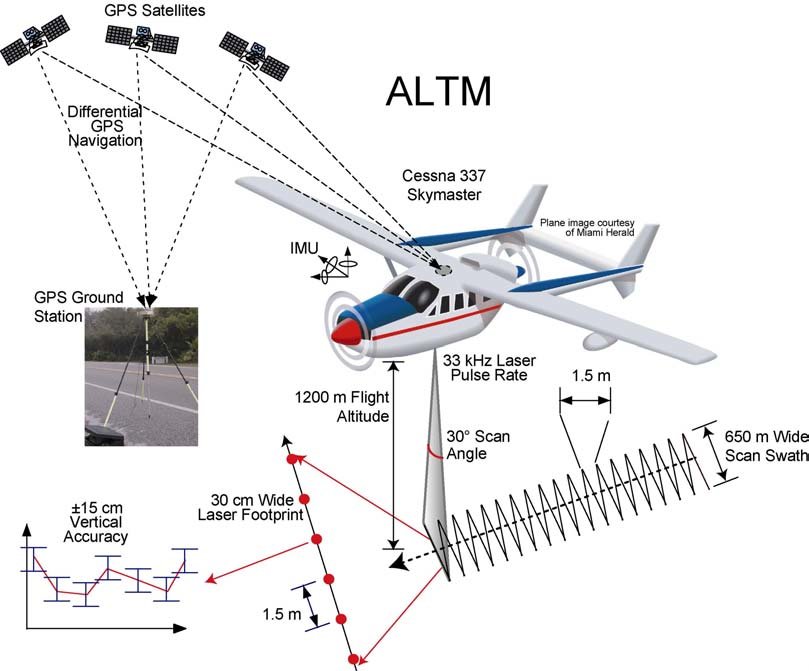
Hệ thống LiDAR bao gồm bộ đầu quét (bộ cảm biến), hệ thống đo quán tính (IMU), hệ thống GPS, hệ thống quản lý bay, hệ thống camera số và hệ thống các thiết bị lưu trữ dữ liệu.
- Bộ máy quét laser (bộ cảm biến):
Gồm hai bộ phận được gắn vào bên dưới máy bay: một bộ phận có vai trò phát xung laser hẹp đến bề mặt trái đất trong khi máy bay di chuyển với tốc độ nhất định. Một máy thu gắn trên máy bay sẽ thu nhận phản hồi của những xung này khi chúng đập vào bề mặt trái đất và quay trở lại thiết bị thu trên máy bay. Hầu hết các hệ thống LiDAR đều sử dụng một gương quét để tạo ra một dải xung. Sóng Laser nằm trong dải sóng cận hồng ngoại để phục vụ công tác đo đạc địa hình, bề mặt trên mặt đất, còn với laser dải sóng xanh lá cây phục vụ công tác đo sâu dưới mặt nước. Độ rộng của dải quét phụ thuộc vào góc dao động của gương, và mật độ điểm mặt đất phu thuộc vào các yếu tố như tốc độ máy bay và tốc độ dao động gương. Tốc độ dao động được xác định bằng cách tính toán tổng thời gian tia laser rời máy bay, đi đến mặt đất và trở lại bộ cảm biến.
- Hệ thống GPS:
Dữ liệu LiDAR được kết hợp với các thông tin vị trí chính xác thu nhận từ thiết bị GPS và hệ thống thiết bị xác định các thông số định hướng góc xoay, góc nghiêng dọc, nghiêng ngang cùng đặt trên máy bay. Các thông tin này được lưu trữ và xử lý, để xác định giá trị tọa độ (x,y,z) chính xác của mỗi điểm trên mặt đất. Hệ thống GPS cung cấp thông tin về vị trí và thời điểm thu nhận tín hiệu LiDAR. Hệ thống GPS bao gồm một máy thu đặt trên máy bay và một máy thu đặt tại mặt đất quá trình xử lý dữ liệu này cho ra kết quả vị trí điểm có độ chính xác cao.
- Hệ thống xác định quán tính IMU:
Các giá trị góc xoay, góc nghiêng dọc, nghiêng ngang, hướng bay quét của hệ thống LiDAR được xác định chính xác bằng thiết bị đạo hàng, góc quay gương tức thời và các khoảng cách thu nhận và dữ liệu GPS được dùng để tính toán tọa độ ba chiều của các điểm LiDAR.
- Hệ thống quản lý bay:
Cho phép lập kế hoạch, thiết kế tuyến bay và theo dõi quá trình bay quét LiDAR.
Ngoài các thiết bị chính, hệ thống LiDAR còn bao gồm các thiết bị ngoại vi khác như hệ thống lưu trữ, giao diện điều khiển thiết bị, điều khiển bay, bộ cấp nguồn. Một hệ thống LiDAR thông thường được tích hợp một máy ảnh số kích thước trung bình, một số còn trang bị máy quay video để theo dõi vùng chụp và mây. Khi được tích hợp với máy ảnh số cỡ trung bình, có thể tiến hành đồng thời quá trình quét LiDAR và chụp ảnh số của một khu vực. quy trình này giúp giảm chi phí bay chụp, thu được các sản phẩm: trực ảnh, mô hình số độ cao và có thể tạo được mô hình thành phố ba chiều…
1.2. Nguyên lý hoạt động của LiDAR
Hệ thống LiDAR xác định được tọa độ các điểm trong không gian ba chiều X,Y, Z) bằng cách đo độ dài của tia laser, xác định góc phương vị của tia quét (dựa vào các góc xoay của thiết bị và góc quay của gương quét được xác định bằng hệ thống IMU) và hệ tọa độ GPS lựa chọn tại thời điểm quét laser.
Thiết bị LiDAR có độ rộng dải quét có thể từ vài chục mét đến hàng trăm mét phụ thuộc vào chiều cao bay và đặc biệt nhờ vào góc quay của tấm gương đước gắn vào đầu thiết bị phát tia laser hướng về phía bề mặt địa hình. Tia laser hoạt động theo nguyên lý xung điện có tần số lớn tới nghìn Khz. Sau khi phát, năng lượng sẽ được phản hồi từ địa hình, địa vật qua hệ thống quang học tới đầu thu của thiết bị xung điện. Dựa vào khoảng chênh lệch thời gian giữa tín hiệu phát đi và tín hiệu thu về, chúng ta xác định được chiều dài của tia laser tại thời điểm quét.
Thiết bị LiDAR hoạt động trong dải phổ cận hồng ngoại với bước sóng khoảng 1504nm cho phép xác định chiều dài với độ chính xác cao với sai số khoảng ± 2cm.
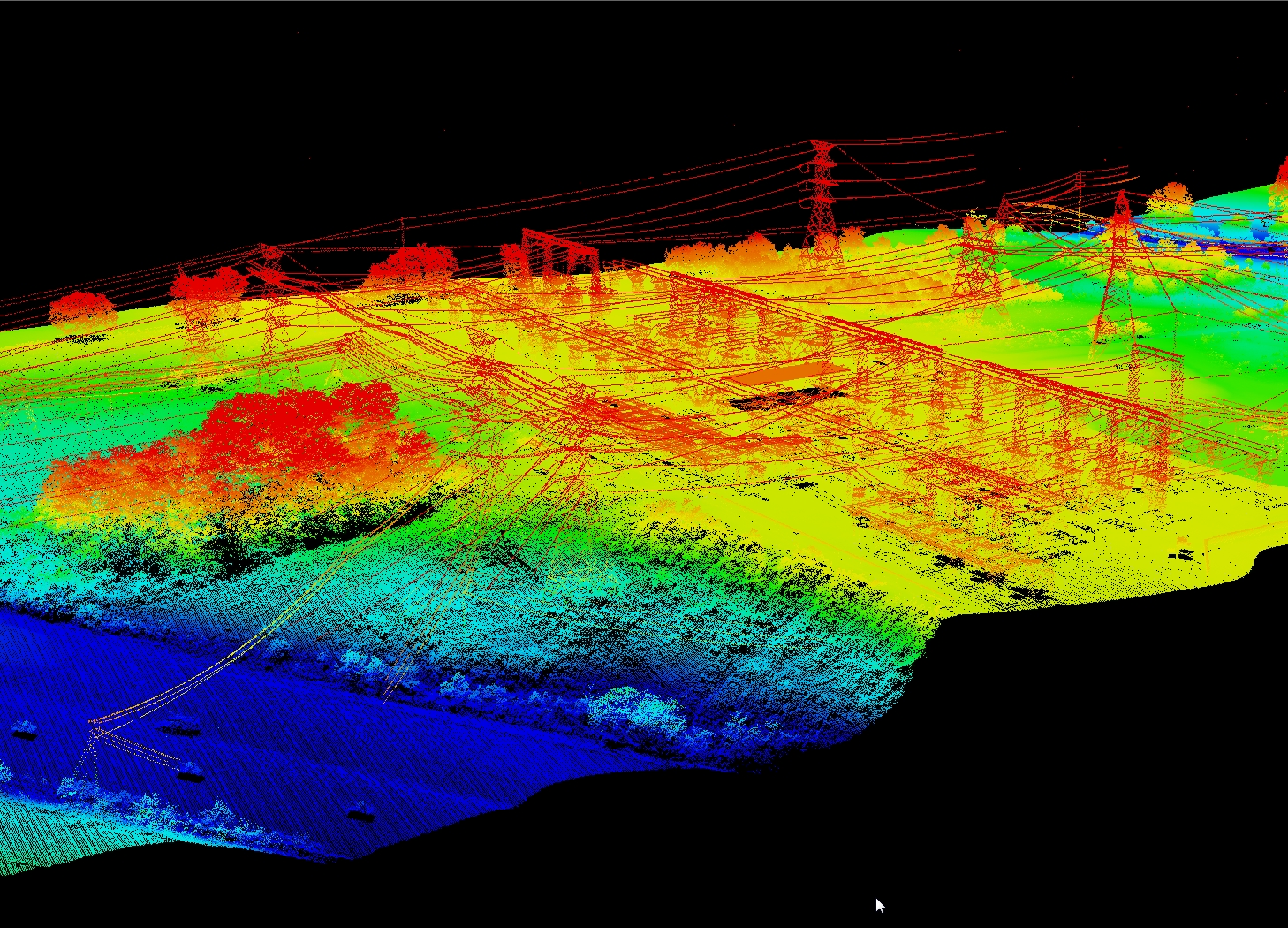
Ngày nay, các tia laser quét liên tục với tần số lên đến hàng triệu điểm trong 1 giây, tùy theo yêu cầu mà mật độ điểm thay đổi từ vài chục đến vài trăm điểm trên 1m2

1.3. Sản phẩm công nghệ LiDAR
Mô hình số địa hình(DTM): là các mô hình số miêu tả bề mặt mặt đất nhưng không bao gồm các đối tượng vật thể trên đó. Dữ liệu thu nhận từ quá trình bay quét LiDAR bao gồm tập hợp các điểm có giá trị mặt bằng và giá trị độ cao tạo ra mô hình số địa hình dạng Raster với mắt lưới lên đến 0.5m, độ chính xác về độ cao có thể đạt tới 0.15m.
Mô hình số bề mặt(DSM): là một mô hình số độ cao miêu tả bề mặt mặt đất và bao gồm cả các đối tượng vật thể trên đó như nhà cửa, cây cây cối, đường dây điện, đường giao thông... Cũng như mô hình số độ cao, mô hình số bền mặt được tạo ra dưới dạng Raster với kích thước mắt lưới Grid đạt tới 0,5m và độ chính xác về độ cao lên tới 0,2m.
Ảnh cường độ xám (intensity): là sản phẩm thu được trong quá trình thu nhận dữ liệu LiDAR. Dựa trên cường độ tín hiệu phản hồi của tia laser thu được, tiến hành nội suy tạo ảnh cường độ xám. Trên bề mặt thực địa bao gồm các đối tượng khác nhau, do đó khả năng hấp thụ và cường độ phản hồi tín hiệu laser cũng khác nhau, từ đó thu nhận và có thể phân biệt được các loại đối tượng khác nhau trên ảnh cường độ xám. Điều này rất có ý nghĩa trong việc phân loại đối tượng trong trường hợp không có ảnh hàng không hay ảnh vệ tinh độ phân giải cao tại khu vực bay quét LiDAR. Độ phân giải của ảnh cường độ xám có thể lên tơi 0,25m. Độ chính xác về mặt bằng và độ cao của các điểm trên ảnh cường độ xám tương đương với độ chính xác của dữ liệu LiDAR gốc.
Bình đồ ảnh trực giao (true otrthophoto): là sản phẩm ảnh được nắn chuyển hình học chính xác trong hệ tọa độ lựa chọn dựa vào các góc xoay được xác định nhờ hệ thống IMU và tọa độ GPS cùng với mô hình số địa hình, mô hình số bề mặt so dữ liệu LiDAR tạo ra. Bình đồ ảnh trực giao trên lý thuyết là ảnh nắn chỉnh hình học đã được loại trừ sai số vị trí điểm do chênh cao địa hình gây ra dựa vào việc sử dụng mô hình số địa hình để nắn chỉnh. Đối với trường hợp bay quét LiDAR có kết hợp chụp ảnh số thì sản phẩm bình đồ ảnh trực giao là sản phẩm trực tiếp của công nghệ LiDAR đem lại hiệu quả rất lớn cho công tác đo đạc lập bản đồ và xây dựng mô hình không gian ba chiều. Bình đồ ảnh trực giao có thể được sử dụng làm lớp phủ bề mặt cho các đối tượng trên bản đồ 3D.
2. Ứng dụng:
- Cơ sở hạ tầng, kiến trúc, xây dựng
- Quản lý rừng, nông nghiệp
- Khai mỏ, hầm lò
- Truyền tải điện.
- Mô hình hóa đô thị.
https://youtu.be/8D0KV4RiZZk
Nguồn: Internet
http://www.hus.vnu.edu.vn/files/LuanVan/LuanVan-DangThanhTung-2011.pdf





